Dolen gaeedigmoduron camuwedi newid y gymhareb perfformiad-i-gost mewn llawer o gymwysiadau rheoli symudiadau. Mae llwyddiant moduron blaengar dolen gaeedig VIC hefyd wedi agor y posibilrwydd o ddisodli moduron servo costus â rhai cost iselmoduron camuMewn nifer gynyddol o gymwysiadau awtomeiddio diwydiannol o safon uchel, mae datblygiadau technolegol yn newid y gymhareb perfformiad-i-gost rhwng moduron stepper a moduron servo.
Moduron stepper yn erbyn moduron servo
Yn ôl doethineb confensiynol, mae systemau rheoli servo yn perfformio'n well mewn cymwysiadau lle mae angen cyflymderau dros 800 RPM ac ymateb deinamig uchel. Mae moduron stepper yn fwy addas ar gyfer cymwysiadau â chyflymderau is, cyflymiad isel i ganolig a trorym dal uchel.
Felly beth yw sail y ddoethineb confensiynol hwn am foduron stepper a moduron servo? Gadewch i ni ei ddadansoddi'n fanylach isod.
1. Symlrwydd a chost
Nid yn unig y mae moduron stepper yn rhatach na moduron servo, maent hefyd yn symlach i'w comisiynu a'u cynnal. Mae moduron stepper yn sefydlog wrth sefyll ac yn dal eu safle (hyd yn oed gyda llwythi deinamig). Fodd bynnag, os oes angen perfformiad uwch ar gyfer rhai cymwysiadau, rhaid defnyddio moduron servo mwy drud a chymhleth.
2. Strwythur
Moduron steppercylchdroi fesul cam, gan ddefnyddio coiliau magnetig i dynnu magnet yn raddol o un safle i'r llall. I symud y modur 100 safle i unrhyw gyfeiriad, mae'r gylched yn gofyn am 100 o weithrediadau camu ar y modur. Mae moduron camu yn defnyddio curiadau i gyflawni symudiadau cynyddrannol, gan ganiatáu lleoli manwl gywir heb ddefnyddio unrhyw synwyryddion adborth.
Mae dull symud y modur servo yn wahanol. Mae'n cysylltu synhwyrydd safle - h.y. amgodwr - â'r rotor magnetig ac yn canfod union safle'r modur yn barhaus. Mae'r servo yn monitro'r gwahaniaeth rhwng safle gwirioneddol y modur a'r safle a orchmynnwyd ac yn addasu'r cerrynt yn unol â hynny. Mae'r system ddolen gaeedig hon yn cadw'r modur yn y cyflwr symud cywir.

3. Cyflymder a thorc
Mae'r gwahaniaeth mewn perfformiad rhwng moduron stepper a servo yn deillio o'u gwahanol atebion dylunio modur.Moduron steppermae ganddyn nhw nifer llawer mwy o bolion na moduron servo, felly mae chwyldro llawn modur stepper angen llawer mwy o gyfnewidiadau cerrynt dirwyn i ben, gan arwain at ostyngiad cyflym mewn trorym ar gyflymderau cynyddol. Yn ogystal, os cyrhaeddir y trorym uchaf, gall y modur stepper golli ei swyddogaeth cydamseru cyflymder. Am y rhesymau hyn, moduron servo yw'r ateb a ffefrir yn y rhan fwyaf o gymwysiadau cyflymder uchel. Mewn cyferbyniad, mae'r nifer uwch o bolion mewn modur stepper yn fanteisiol ar gyflymderau is, pan fydd gan y modur stepper fantais trorym dros fodur servo o'r un maint.
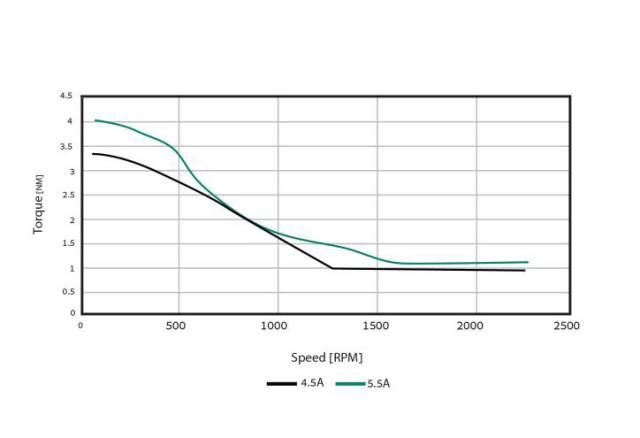
Wrth i'r cyflymder gynyddu, mae trorym y modur stepper yn lleihau
4. Lleoli
Mae gwahaniaethau pwysig rhwng moduron camu a moduron servo mewn cymwysiadau lle mae angen gwybod union safle'r peiriant bob amser. Mewn cymwysiadau symudiad dolen agored a reolir gan foduron camu, mae'r system reoli yn tybio bod y modur bob amser yn y cyflwr symudiad cywir. Fodd bynnag, ar ôl i broblem godi, fel modur wedi stopio oherwydd cydran sydd wedi sownd, nid yw'r rheolydd yn gallu gwybod safle gwirioneddol y peiriant, a all arwain at golli safle. Mae gan system dolen gaeedig y modur servo ei hun fantais: os caiff ei jamio gan wrthrych, bydd yn ei ganfod ar unwaith. Bydd y peiriant yn rhoi'r gorau i weithredu ac ni fydd byth allan o safle.
5. Defnydd gwres ac ynni
Mae moduron stepper dolen agored yn defnyddio cerrynt sefydlog ac yn rhoi llawer o wres i ffwrdd. Dim ond y cerrynt sydd ei angen ar gyfer y ddolen gyflymder y mae rheolaeth dolen gaeedig yn ei ddarparu ac felly'n osgoi problem gwresogi'r modur.
Crynodeb cymhariaeth
Mae systemau rheoli servo yn fwyaf addas ar gyfer cymwysiadau cyflym sy'n cynnwys newidiadau llwyth deinamig, fel breichiau robotig. Mae systemau rheoli stepper, ar y llaw arall, yn fwy addas ar gyfer cymwysiadau sydd angen cyflymiad isel i ganolig a trorym dal uchel, fel argraffwyr 3D, cludwyr, is-echelinau ac ati. Gan fod moduron stepper yn rhatach, gallant leihau cost systemau awtomeiddio pan gânt eu defnyddio. Bydd yn rhaid i systemau rheoli symudiad sydd angen manteisio ar nodweddion moduron servo brofi bod y moduron cost uwch hyn yn werth eu pwysau mewn aur.
Moduron stepper gyda rheolaeth dolen gaeedig
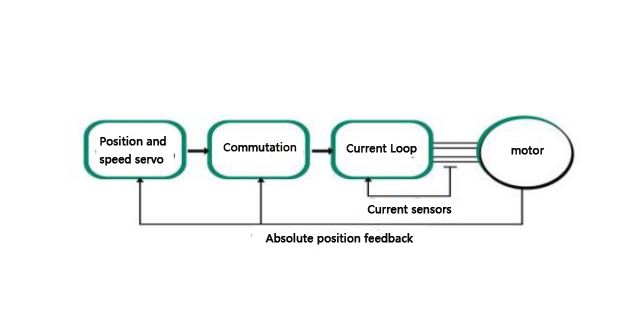
Mae'r modur stepper gyda rheolaeth electronig integredig yn cyfateb i fodur DC di-frwsh dau gam a gall berfformio rheolaeth dolen safle, rheolaeth dolen cyflymder, rheolaeth DQ, ac algorithmau eraill. Defnyddir amgodwr absoliwt un tro ar gyfer cymudo dolen gaeedig, gan sicrhau'r trorym gorau posibl ar unrhyw gyflymder.
Defnydd ynni isel a chadw'n oer
Mae moduron stepper VIC yn effeithlon iawn o ran ynni. Yn wahanol i foduron stepper dolen agored, sydd bob amser yn gweithredu ar orchymyn cerrynt llawn ac yn achosi problemau gwres a sŵn, mae'r cerrynt yn newid yn ôl amodau gwirioneddol y symudiad, er enghraifft yn ystod cyflymiad ac arafiad. Yn debyg i servos, mae'r cerrynt a ddefnyddir gan y moduron stepper hyn ar unrhyw adeg benodol yn gymesur â'r trorym gwirioneddol sydd ei angen. Gan fod y modur a'r bwrdd rheoli electronig integredig yn rhedeg yn oerach, gall moduron stepper VIC gyflawni trorym brig uwch sy'n gymharol â moduron servo.
Hyd yn oed ar gyflymderau uchel, mae angen llai o gerrynt ar foduron stepper VIC
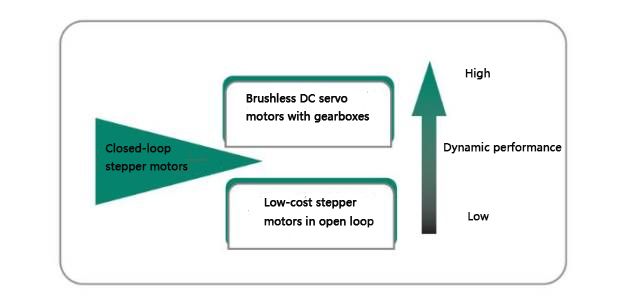
Wedi'i ysgogi gan ddatblygiadau mewn technoleg dolen gaeedig, mae moduron stepper yn gallu treiddio i gymwysiadau perfformiad uchel, cyflymder uchel a oedd gynt yn perthyn yn gyfan gwbl i foduron servo.
Moduron stepper gyda thechnoleg dolen gaeedig
Beth pe bai modd cymhwyso manteision technoleg servo dolen gaeedig i foduron stepper?
A allem ni gyflawni perfformiad cymharol â moduron servo gan barhau i sylweddoli manteision cost moduron stepper?
Drwy gyfuno technoleg rheoli dolen gaeedig, byddai'r modur camu yn dod yn gynnyrch cynhwysfawr gyda manteision moduron servo a chamu am gost isel. Gan fod moduron camu dolen gaeedig yn cynnig gwelliannau sylweddol mewn perfformiad ac effeithlonrwydd ynni, gallant ddisodli moduron servo drutach mewn nifer gynyddol o gymwysiadau safonol uchel.
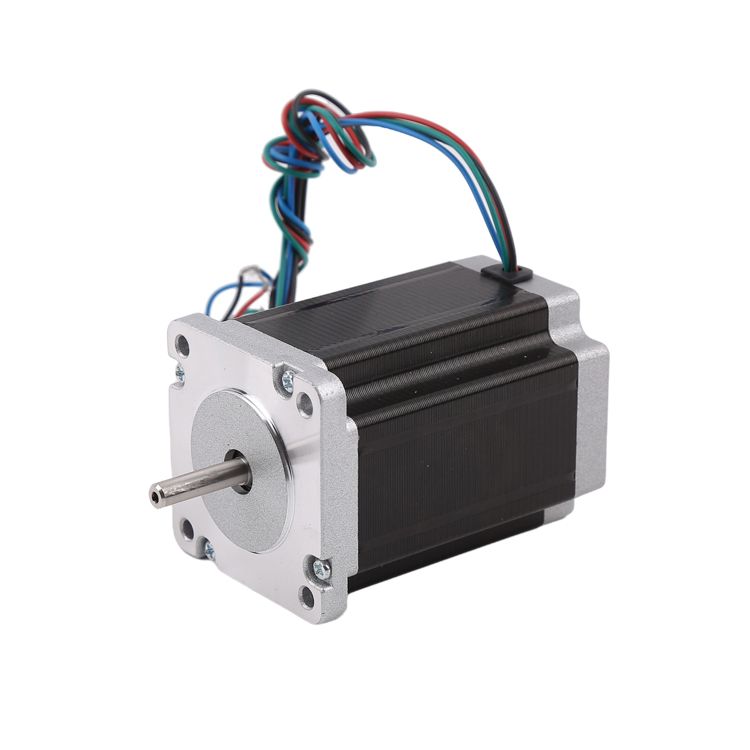
Dyma enghraifft o fodur stepper integredig VIC gyda rheolaeth dolen gaeedig wedi'i hymgorffori i esbonio perfformiad a manteision ac anfanteision moduron stepper gyda thechnoleg dolen gaeedig.
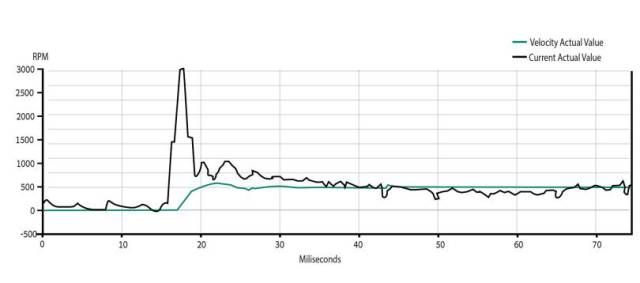
Gofynion perfformiad sy'n cyfateb yn union
Er mwyn sicrhau digon o dorc i oresgyn aflonyddwch ac osgoi colli camau, mae angen i foduron stepper dolen agored fel arfer sicrhau bod y trorc o leiaf 40% yn uwch na'r gwerth sy'n ofynnol gan y cymhwysiad. Nid oes gan foduron stepper dolen gaeedig heddiw y broblem hon. Pan fydd y moduron stepper hyn yn stopio oherwydd gorlwytho, byddant yn parhau i ddal y llwyth heb golli trorc. Byddant yn parhau i weithredu ar ôl i'r cyflwr gorlwytho gael ei ddileu. Gellir gwarantu'r trorc uchaf ar unrhyw gyflymder penodol ac mae'r synhwyrydd safle yn sicrhau nad oes unrhyw golled cam. Felly gellir pennu moduron stepper dolen gaeedig i gyd-fynd yn union â gofynion trorc y cymhwysiad perthnasol heb yr angen am ymyl ychwanegol o 40%.
Gyda moduron stepper dolen agored, mae'n anodd bodloni gofynion trorym uchel ar unwaith oherwydd y risg o golli camau. O'i gymharu â moduron stepper confensiynol, gall moduron stepper dolen gaeedig VIC gyflawni cyflymiad cyflym iawn, sŵn gweithredol isel a chyseiniant isel. Gallant weithredu ar led band llawer uwch a chyflawni perfformiad rhagorol.
Dim cabinet
Mae Toda yn integreiddio'r bwrdd rheoli gyriant â'r modur, gan leihau faint o weirio a symleiddio'r ateb gweithredu. Gyda Toda, gallwch adeiladu peiriannau heb gabinetau.
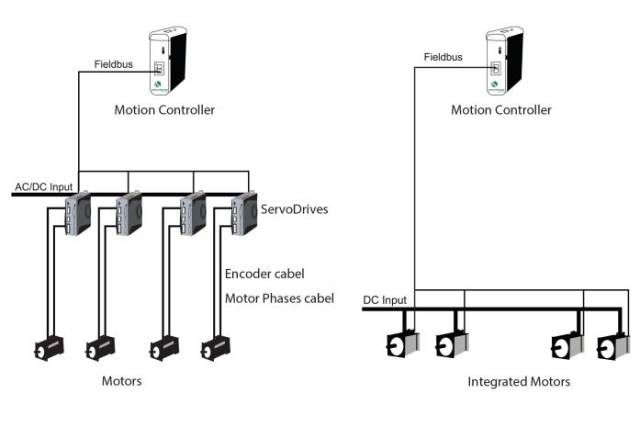
Mae integreiddio electroneg â moduron stepper yn lleihau cymhlethdod
Gyda thechnoleg dolen gaeedig, mae moduron stepper dolen gaeedig yn cynnig cywirdeb ac effeithlonrwydd rhagorol i ddefnyddwyr, gyda pherfformiad modur servo a chost isel modur stepper. Mae moduron stepper cost is yn treiddio'n raddol i gymwysiadau a fyddai fel arall yn cael eu dominyddu gan foduron servo cost uchel.
Amser postio: 10 Ebrill 2023